Shibiao Xu Feihu Zhang Xiaofei He
Xukun Shen Xiaopeng Zhang
|
Abstract
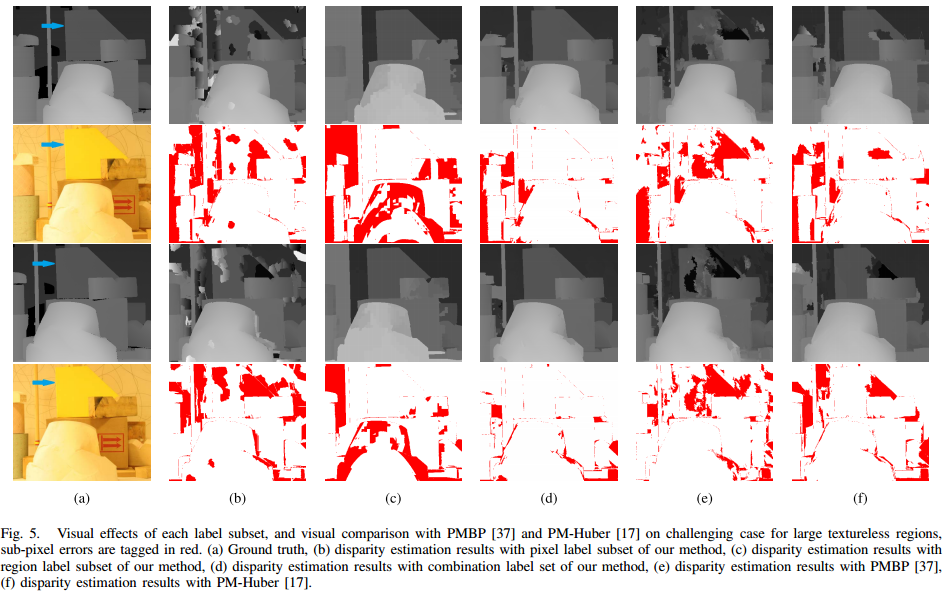
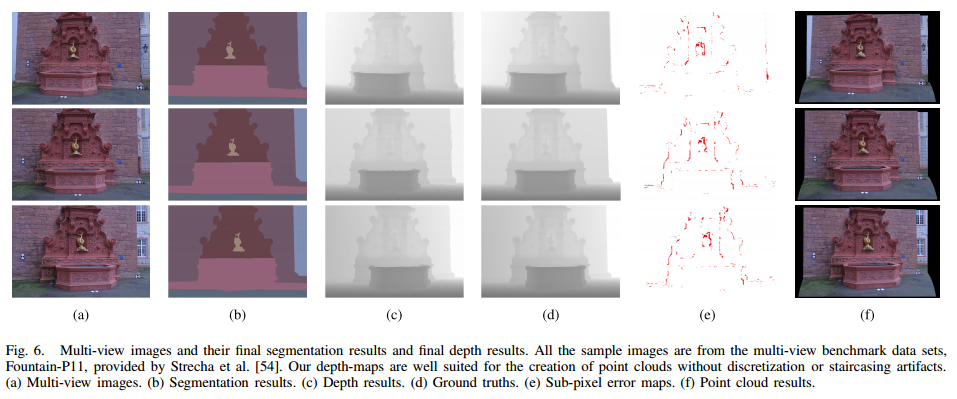
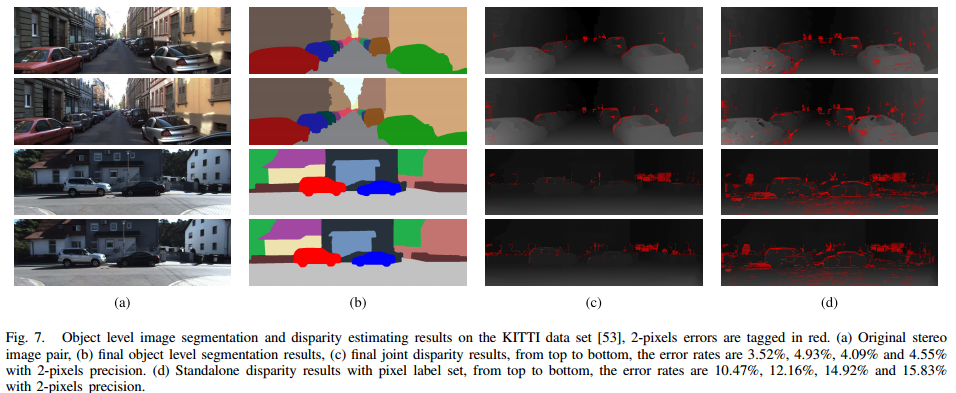
This paper presents a unified variational formulation for joint object segmentation and stereo matching, which takes both accuracy and efficiency into account. In our approach, depth-map consists of compact objects, each object is represented through three different aspects: 1) the perimeter in image space; 2) the slanted object depth plane; and 3) the planar bias, which is to add an additional level of detail on top of each object plane in order to model depth variations within an object. Compared with traditional high quality solving methods in low level, we use a convex formulation of the multilabel Potts Model with PatchMatch stereo techniques to generate depth-map at each image in object level and show that accurate multiple view reconstruction can be achieved with our formulation by means of induced homography without discretization or staircasing artifacts. Our model is formulated as an energy minimization that is optimized via a fast primal-dual algorithm, which can handle several hundred object depth segments efficiently. Performance evaluations in the Middlebury benchmark data sets show that our method outperforms the traditional integer-valued disparity strategy as well as the original PatchMatch algorithm and its variants in subpixel accurate disparity estimation. The proposed algorithm is also evaluated and shown to produce consistently good results for various real-world data sets (KITTI benchmark data sets and multiview benchmark data sets) .
Downloads
 |
``PM-PM: PatchMatch with Potts Model for Object Segmentation and Stereo Matching.'' Shibiao Xu, Feihu Zhang, Xiaofei He, Xukun Shen, Xiaopeng Zhang. IEEE Transaction on Imaging Processing (TIP) 24.7 (2015): 2182 - 2196. |
Our Method
 |
Experiments
 |
 |
 |
 |
 |
Reference
[1] M. Bleyer, C. Rother, P. Kohli, D. Scharstein, andS. Sinha, “Object stereo—Joint stereo matching and object segmentation,” inProc. IEEE Conf. Comput. Vis. Pattern Recognit. (CVPR), Jun. 2011, pp. 3081–3088.
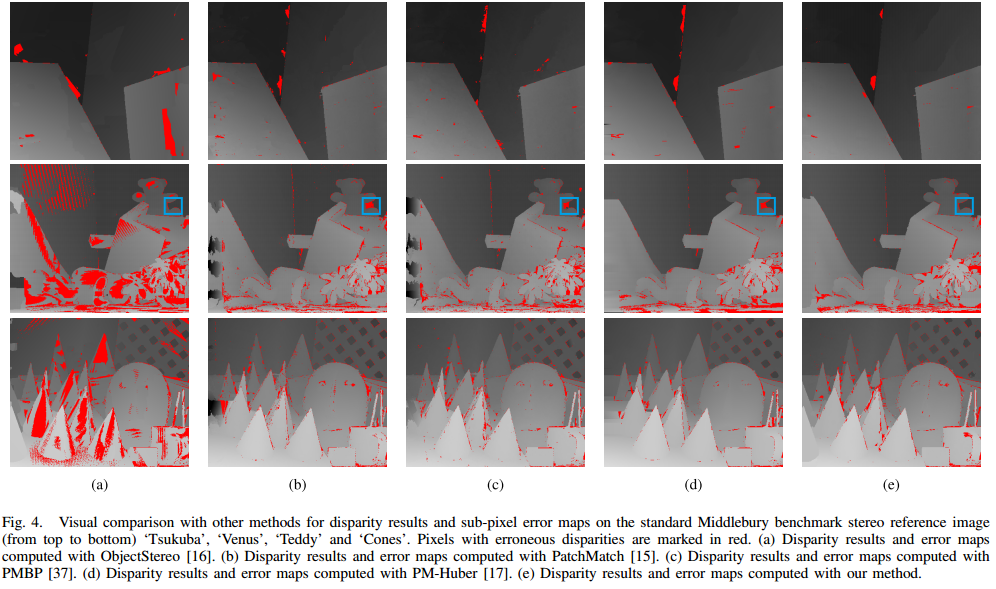
[2] P. Heise, S. Klose, B. Jensen, and A. Knoll, “PM-Huber: PatchMatch with Huber regularization for stereo matching,” inProc. IEEE Int. Conf. Comput. Vis. (ICCV), Dec. 2013, pp. 2360–2367.
[3]F. Besse, C. Rother, A. Fitzgibbon, and J. Kautz, “PMBP: PatchMatch belief propagation for correspondence field estimation,”Int. J. Comput. Vis., vol. 110, no. 1, pp. 2–13, Oct. 2014.